ドローンを使用した三次元測量・地上測量は株式会社エヌ・エム調査設計まで
〒910-2141 福井市高尾町13-24-26 TEL:0776-41-4805



地上調査は最新鋭のデジタルソフトを導入し、あらゆる地上測定に対応しています。【サンプルを閲覧する】
三次元測量計測・UAVレーザー計測・移動式レーザー計測(SLAM)
株式会社エヌ・エム調査設計は、幅広い知識・経験に裏付けされた応用力をもって
迅速に行動する技術者集団です。
土地に関する調査、計画の基礎となる数値を計測する地上測量は常に精度を要求されています。
より確かなものを追求するためドローン(UAV)をはじめとする最新鋭の測量機械等をいち早く導入し、
どのような地上測量にも対応しています。

活用事例をご紹介します
UAV航空、空撮測量による調査事例をご紹介致します。多種多様な現場で活用いただいております。

使用機材の一例です
UAV写真測量における使用機材をご紹介致します。お客様のさまざまなニーズに応えるため、各種ドローンを取り揃えております。

作業の流れをご紹介します。
作業工程のご紹介です。UAVを用意た公共測量マニュアル(案)に準じてUAVを用意た測量作業を行っております。
INFORMATION

会社概要
私たちはGPS測量・地上測量・GIS(地理情報システム)CADトレースなどを手がけるプロ集団です。

UAV空撮による調査事例
UAV航空測量で作成した三次元データと地上レーザスキャナーの三次元データを合わせて三次元モデルを作成。

SLAMベース三次元ポータブルレーザーマッピングシステム
移動しながら範囲100m・全方位(360°)を計測可能。気軽に高密度の三次元データを取得可能。
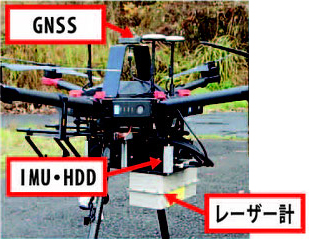
UAVレーザー計測システム
高密度な三次元点群データを取得可能。 UAVを飛行させ低高度の上空から地上方向へレーザを高速照射。面的に高密度なデータを取得が可能。
 電話する
電話する 問い合わせ
問い合わせ